|
Architectures de contrôle comportementales et réactives pour la coopération d'un groupe de robots mobiles
Table des matières
Introduction
Ces travaux de recherche, réalisés en thèse, ont porté sur le contrôle de systèmes multi-robots autonomes et réactifs à forte dynamique d'interaction. L'objectif a été de contrôler des entités robotiques les plus minimalistes possibles, et d'utiliser les interactions locales entre robots pour produire une forme d'intelligence collective évoluée. La maîtrise de ces interactions passe inévitablement par la maîtrise des actions engendrées par les robots élémentaires. C'est donc dans le cadre de la conception d'une architecture de contrôle, qui exhibe à la fois des caractéristiques individuelles adaptées à des systèmes multi-robots hautement dynamiques, et des caractéristiques collectives qui favorisent des buts globaux, que se sont inscrits mes travaux de recherche. La démarche entreprise a consisté à focaliser la conception du contrôle sur l'individu élémentaire constituant le système multi-robots (approche ascendante «Bottom-Up»). Ainsi, en brisant la complexité inhérente au système multi-robots il nous a été possible de mieux maîtriser les effets de masse induits par les robots et d'augmenter par conséquent à la fois la vitesse, la flexibilité et la robustesse d'exécution des tâches complexes entreprises. Plus spécifiquement, j'ai proposé durant mes travaux de thèse un Processus de Sélection d'Action Hiérarchique (PSAH) qui permet à l'échelle du robot de coordonner l'activité d'un ensemble de primitives élémentaires (comportements) d'une manière hiérarchique et flexible, et à l'échelle du groupe de robots, d'atteindre une coordination favorisant des buts globaux. Les performances du PSAH ont été améliorées par la suite via l'adjonction d'un mécanisme de fusion d'actions approprié conduisant ainsi au PSAH-Hybride. J'ai aussi utilisé durant mes travaux de thèse le formalisme des algorithmes génétiques pour l'optimisation des paramètres du PSAH-Hybride. La validation des résultats a été effectuée à l'aide d'expérimentations sur des mini-robots ALICE (2cm×2cm×2cm) et plus largement sur un ensemble d'études statistiques réalisées sur un grand nombre de données obtenues grâce au simulateur MiRoCo (Mini-Robotique Collective).
Parmi la multitude de tâches génériques rencontrées dans la littérature, nous avons principalement concentré nos efforts sur la Tâche Coopérative de Poussée d'Objets (TCPO), qui va servir de base d'essai aux différentes possibilités liées aux architectures de contrôle que nous avons proposées. L'objectif général de cette tâche est de pouvoir déplacer d'une manière coopérative un objet d'une position initiale vers une destination finale. L'objet à pousser est choisi de telle sorte que son poids et/ou ses dimensions soient largement plus élevés que ceux d'un robot élémentaire. La coopération dans ce cas de figure est donc impérative (cf. Fig.1).
(b) Simulation avec MiRoCo
|

(a) Expérimentation multi-robots
|
|
Fig.1. Tâche coopérative de poussée d'objets (TCPO)
|
Le PSAH-Hybride appliqué à la TCPO
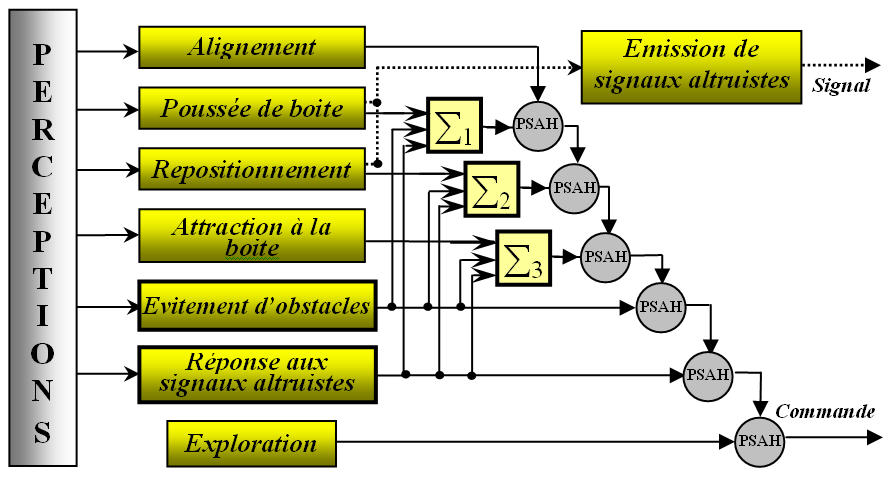
La figure 2 donne un exemple d'architecture de contrôle comportementale obtenue pour réaliser la TCPO, elle s'est avérée très performante pour réaliser une coopération de robots dans un environnement très confiné et caractérisé par une dynamique d'interaction entre robots élevée. L'implantation de cette architecture nous a amenés à développer des comportements élémentaires génériques (e.g., l'évitement d'obstacles ou l'exploration) et d'autres davantage dédiés à la tâche à réaliser, telle le repositionnement ou la poussée de boite dans le cas de la TCPO. Le développement de ces architectures de contrôle nous a aussi conduits à proposer des comportements altruistes entre robots afin d'améliorer leur coopération. L'adjonction de ces comportements altruistes, qui se résume à une forme de communication de bas niveau entre robots, nous a confortés dans l'idée que, malgré la simplicité des informations échangées entre robots, cela permet d'une part, d'éviter des situations conflictuelles, et d'autre part de générer une forme de coopération implicite entre robots, deux éléments qui conduisent à accélérer la réalisation de la tâche coopérative.
Vous trouverez les détails des mécanismes de coordination entre comportements proposés (le PSAH et le PSAH-Hybride) et ceux relatifs aux comportements élémentaires aux chapitre IV et V de mon mémoire de thèse.

Fig.2. Architecture de contrôle comportementale intégrant le PSAH-Hybride pour réaliser la TCPO
Table des matières
|
|
|
|
Simulateur MiRoCo
J'ai conçu et développé tout au long du déroulement de mes travaux de doctorat un simulateur pour Mini-Robotique Collective (MiRoCo) (Fig.3) basé sur ossature multi-agents. MiRoCo est à présent un outil complet et convivial pour simuler d'une manière précise et rigoureuse des systèmes multi-robots à forte dynamique d'interaction. Ainsi, nous avons pu évaluer objectivement la pertinence des architectures de contrôle proposées. Parmi les principales composantes de MiRoCo nous soulignons l'existence d'un moteur physique (modèle de collisions, modèle d'émission/réception des signaux, etc.) très performant, s'ajoute à cela un affichage virtuel 3D très réaliste qui utilise OpenGl (Open Graphics Library). L'autre outil de simulation que j'ai développé durant mes travaux de recherche correspond à la bibliothèque d'algorithmes génétiques BibAG qui, interfacée avec MiRoCo, nous permet de réaliser des optimisations appropriées des architectures de contrôle proposées.
Fig.3. Simulateur MiRoCo
Table des matières
|
Les mini-robots ALICE
Dans la perspective de pouvoir implémenter une architecture de contrôle complètement distribuée et réactive sur un grand nombre de robots minimalistes (autant d'un point de vue structurel que décisionnel), notre choix s'est vite porté sur le mini-robot ALICE (Fig.1(b)). ALICE offre une autonomie à la fois énergétique et décisionnelle très appréciable relativement à ses dimensions qui ne sont que de 2cm×2cm×2cm. De plus, ce mini-robot permet des expérimentations avec un grand nombre de robots dans des environnements très confinés, et tout cela en gardant des coûts d'investissement et d'exploitation relativement faibles.
La plate-forme expérimentale développée se prête bien à l'étude de la coopération d'un groupe de mini-robots autonomes. Les phases expérimentales nous ont amenés à proposer et à développer de nouveaux capteurs qui puissent être intégrés aisément sur les mini-robots ALICE (Fig.5). Parmi ces capteurs nous citons : une boussole numérique pour la détection du nord magnétique terrestre (repère absolu pour tous les ALICE), un capteur de contact pour la détection de l'objet à pousser et un anneau de capteur de lumière (pour obtenir la direction relative d'une source lumineuse).
Fig.5. Etage de capteurs ajouté sur le mini-robot ALICE
Les aspects matériels et logiciels implémentés sur les mini-robots ALICE ainsi que les principaux éléments composants la plate-forme expérimentale (l'environnement, l'aspect vision, etc.) sont détaillés au chapitre VIII de mon mémoire de thèse.
Table des matières
Plate-forme expérimentale
Afin de valider expérimentalement les travaux de recherche entrepris en thèse, j'ai mis en place une plate-forme expérimentale (Fig.4 (a)) pour robotique mobile collective. Cette plate-forme a permis de vérifier, entre autres, la viabilité des comportements élémentaires et celle des mécanismes de coordination entre comportements proposés (le PSAH et le PSAH-Hybride).
|
|
|
|
(a) Éléments de la plate-forme expérimentale
|
(b) Mini-robots ALICE
|
|
|
Simulations et expérimentations multi-robots effectuées
Il est présenté dans ce qui suit un échantillon des simulations et expérimentations que j'ai effectuées dans le cadre de mes travaux de thèse.
Dynamique d'interaction d'un groupe de robots mobiles
|
 Taille : 7 MO
|
Montre la grande dynamique d'interaction entre robots mobiles réalisant soit une exploration aléatoire de leur environnement soit une coopération pour réaliser la tâche coopérative de poussée d'objets.
|
|
Taille : 2 MO
|
|
|
|
Tâche coopérative de poussée d'objets
|
|

Taille : 10 MO
|
Simulations représentant la réalisation de la tâche coopérative de poussée d'objets, et ce pour différentes formes (circulaire et cubique) et dimensions des objets à pousser.
|
|
Taille : 14 MO
|
|
Taille : 6 MO
|
Tâche de fourragement
|
|
Taille : 17 MO
|
Montre la réalisation de la tâche de fourragement par un groupe de robots mobiles. Cette tâche consiste à récolter un ensemble d'éléments présents dans l'environnement pour les ramener vers le nid (la cible).
|
Expérimentation
|
 Taille : 8 MO |
Expérimentation avec des mini-robots ALICE pour réaliser la tâche coopérative de poussée d'objets. La deuxième vidéo montre en plus, une réaffectation de la tâche courante d'un des mini-robots ALICE en utilisant une télécommande.
|
|
Taille : 12 MO
|
|
|
|
|
Mise à jour le Mercredi, 18 Octobre 2023 20:42 |